Полоса пропускания контура
Полоса пропускания преобразователя
Полоса пропускания контура настраивается пользователем путем установки значения в битах LBW регистров C1KonturStngs/C2KonturStngs.
Таблица 9 – Полоса пропускания преобразователя
| LBW | Полоса пропускания, Гц | Разрядность, бит (в лабораторных условиях, fex = 10 кГц) | Длительность переходного процесса, мс |
|---|---|---|---|
| 3 | 5617 | 10 | 0.8 |
| 4 | 3984 | 12 | 1 |
| 5 | 2840 | 12 | 1.5 |
| 6 | 2015 | 12 | 2 |
| 7 | 1428 | 12 | 3 |
| 8 | 1011 | 13 | 4 |
| 9 | 716 | 13 | 6 |
| 10 | 507 | 14 | 8 |
| 11 | 358 | 14 | 12 |
| 12 | 253 | 14 | 16 |
| 13 | 179 | 14 | 24 |
| 14 | 127 | 15 | 32 |
| 15 | 89 | 15 | 48 |
| 16 | 63 | 16 | 64 |
| 17 | 45 | 16+ | 96 |
| 18 | 32 | 16+ | 128 |
| 19 | 22.4 | 16+ | 192 |
| 20 | 15.9 | 16+ | 256 |
Выбор значения LBW меняет коэффициенты петлевого фильтра таким образом, чтобы обеспечить переходной процесс, близкий по форме к критическому, при номинальных сигналах на входах микросхемы. При выборе полосы пропускания контура LBW необходимо найти компромисс между требуемой разрядностью и динамикой преобразования. Чем уже полоса пропускания контура, тем большая ошибка возникает при ускорении вала, и тем длительнее переходной процесс первоначального нахождения угла. В то же время, чем шире полоса пропускания контура, тем меньшую разрядность можно получить на выходе преобразователя. Значение полосы пропускания контура, записываемое в регистр LBW, выбирается из таблицы 9 или настраивается экспериментально, в зависимости от используемой схемы подключения преобразователя, необходимой динамики преобразования и разрядности. Если частота цикла преобразования fclk отличается от номинальной (1024 кГц), полоса пропускания контура меняется пропорционально изменению частоты.
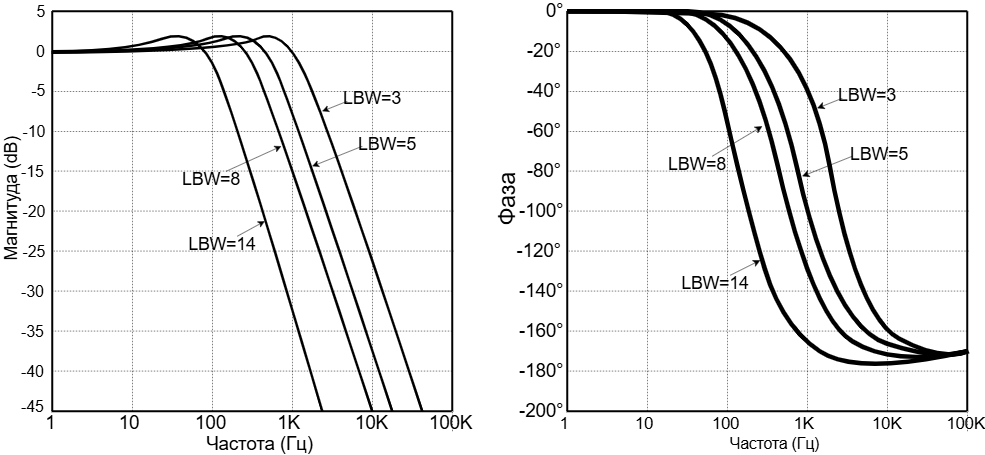
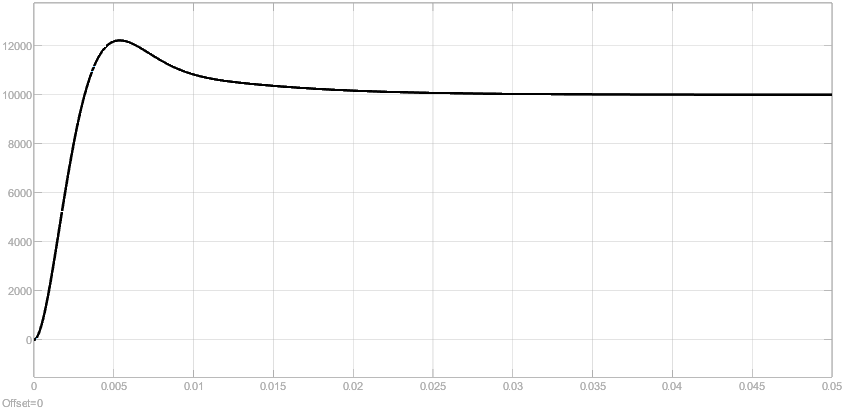
Форма переходного процесса также остается постоянной, изменяется только время переходного процесса. Вид переходного процесса в контуре при номинальной амплитуде входного сигнала близок к критическому.
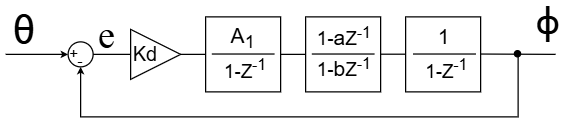
Передаточная функция открытого контура (с незамкнутой обратной связью) выражается следующей функцией
где LBW – значение, записанное в регистр LBW[4:0].
принимает следующие значения:
- при ;
- при ;
- при .
Если установлен бит , то:
- при ;
- при ;
- при .
Формула (13) верна для максимальной амплитуды сигнала на входах преобразователя (в микросхеме соответствует сигналу на входе микросхемы В [пик-пик] и значениям в регистрах юстировки по умолчанию). Масштабирование сигналов осуществляется в блоке масштабирования и преобразования координат.
Преобразуя из формулы (13), можно рассчитать максимальную ошибку при ускорении:
Полоса преобразователя выбирается пользователем в зависимости от соотношения сигнал/шум на входе микросхемы, максимальной допустимой ошибки при ускорении и времени переходных процессов. Например, при повышенном шуме и помехах внешней схемы возможно получение необходимой разрядности путем настройки меньшей полосы пропускания контура. При этом время переходных процессов и ошибка при ускорении увеличиваются.