Архитектура и принцип работы
Принцип преобразования сигналов СКВТ в код угла
В основе преобразователя 5400ТР065А-022 лежит система регулирования с замкнутой обратной отрицательной связью по углу поворота.
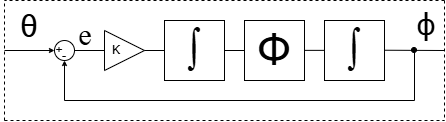
Следящий контур стремится свести разницу выходного и входного значения к нулю, делая свой выход равным входной координате. Контур содержит следующие элементы:
- вычислитель ошибки
- усилитель
- интегратор для демодуляции сигнала ошибки
- петлевой фильтр и интегратор для компенсации запаздывания и получения нулевой ошибки при равномерном движении датчика.
Для получения ошибки e контур в обратной связи содержит модель датчика, которая осуществляет преобразование вычисленной на предыдущем шаге координаты в виртуальные сигналы датчика , .
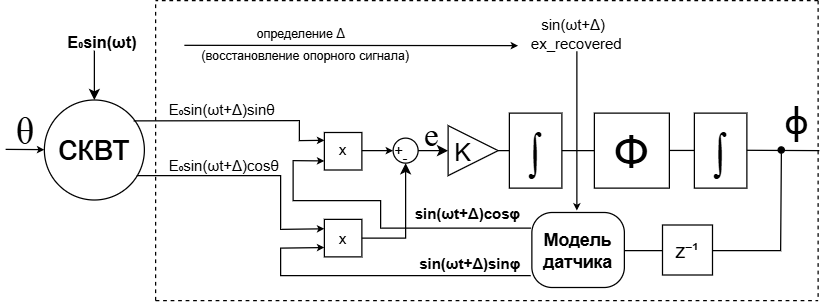
Виртуальные сигналы умножаются на входные сигналы с датчика:
Вычисляется разность сигналов:
Высокочастотная составляющая подавляется на первом интегрирующем звене контура, выполняющим роль ФНЧ.
Оставшееся выражение можно преобразовать с использованием тригонометрического тождества:
При корректной работе контура разница становится малым числом, для которого верно следующее выражение:
Полученное после первого интегрирования значение является разницей между истинным положением ротора и вычисленной следящим контуром координатой, и это значение получено без проведения вычислений, обратных к функции СКВТ. Модель функции СКВТ в обратной связи может быть усложнена параметрами и естественными искажениями порождаемых сигналов в целях увеличения соответствия виртуальных к реальным сигналам с датчика.
Взятие разницы двух последовательных по времени координат эквивалентно дифференцированию угла, а результат является угловой скоростью, из которой в контуре восстанавливается координата с помощью второго интегратора.
Архитектура микросхемы
Микросхема содержит два независимых блока преобразователя координата/код (далее “преобразователь 1” и “преобразователь 2”), которые могут использоваться как независимо, так и совместно для повышения точности или надежности преобразования. В обозначении регистров, принадлежащих каждому преобразователю, используется префикс “C1” и “C2“ соответственно. Каждый блок преобразователя реализует следящий принцип измерения. Для подачи возбуждающего напряжения на датчик микросхема содержит два генератора сигналов возбуждения датчиков. Сигналы с вторичных обмоток датчика преобразуются в цифровую форму и подаются на вход преобразователя, который осуществляет нахождение координаты, используя виртуальную модель датчика и контур с обратной связью.
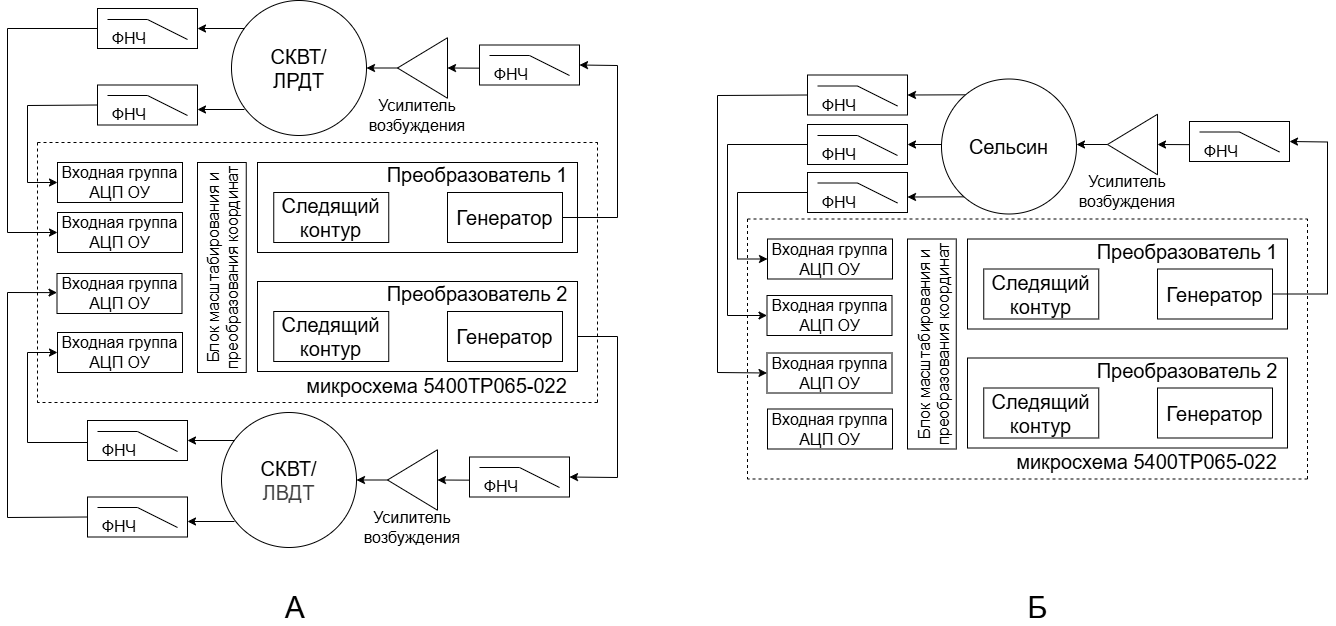
Наличие 4 входных групп и 2 преобразователей позволяет использовать микросхему в различных включениях:
- один или два датчика СКВТ (с синхронным или независимым возбуждением)
- СКВТ с 4-мя выходными обмотками и одной обмоткой возбуждения
- Сельсин (3 выходных обмотки)
- один или два датчика ЛРДТ (с синхронным или независимым возбуждением)
Микросхема позволяет использовать внешний независимый генератор возбуждения. Микросхема имеет возможность обрабатывать демодулированные сигналы.