Блок модели датчика
В микросхему заложено несколько моделей вычисления виртуальных сигналов в зависимости от типа датчика. Выбор и настройка параметров модели дает возможность приблизить виртуальные сигналы к реальным, сокращая разницу между ними, что снижает нелинейности и шум координаты на выходе следящего контура. Если погрешности датчика и схемы не известны, регистры должны оставаться в значениях по умолчанию. Выбор типа модели осуществляется битами Sensor_mode.
Модель датчика в режиме СКВТ/сельсин
При подключении СКВТ или сельсина используется модель СКВТ/сельсин (Sensor_mode==0). Для сельсина сигналы преобразуются в декартовую систему координат (аналогичную СКВТ) блоком масштабирования и преобразования координат.
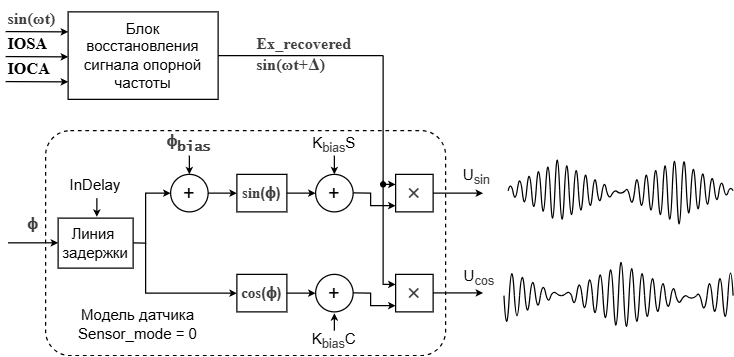
Модель датчика в режиме СКВТ/сельсин использует восстановленный сигнал опорной частоты Ex_recovered (см. подраздел 5.6 «Блок восстановления сигнала опорной частоты») и вычисленный угол для расчета сигналов по формулам:
где:
- InDelay – фиксированная дополнительная погрешность к групповой задержке сигналов в фильтрах на плате и в датчике. Основная часть групповой задержки сигнала Uex в фильтрах и датчике имитируется с помощью операции восстановления до Ex_recovered в блоке восстановления сигнала опорной частоты.
- – угол в диапазоне , вычисленный на предыдущем шаге, задержанный на InDelay тактов .
- – коэффициенты смещения нуля по каналам sin и cos (знаковое число в дополнительном коде);
- – неортогональность осей X и Y.
Модель ЛРДТ по 5-проводной схеме
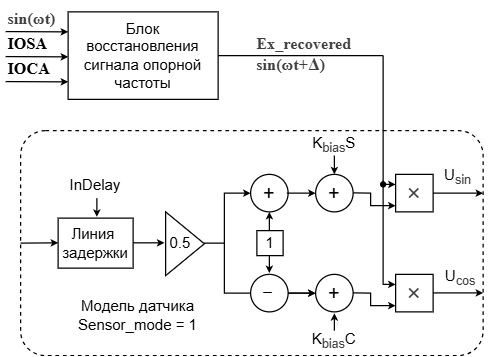
где:
- KbiasS, KbiasC – коэффициенты смещения нуля по каналам S и C соответственно (знаковое число в дополнительном коде);
- – координата в диапазоне от до , вычисленная на предыдущем шаге, задержанная на InDelay тактов .
- Умножение координаты на 0.5 растягивает выход контура на рабочий диапазон датчика, у которого наведенная ЭДС выходных независимых обмоток не меняет своей полярности.